



在机器人各轴上下限位修改 一文中介绍了如何查看与修改机器人各轴的上下软限位,注意:通常不建议修改,若确实需要修改,也尽量往小的数据改。
如果希望方便的写屏当前机器人型号以及各轴上下限(角度显示),如何实现?
可以通过ReadCfgData指令对相关数据进行读写,例如1轴上限的数据位于MOC的Arm主题下,可以使用如下指令将数据存于upper_no数据中
ReadCfgData "/MOC/ARM/rob1_1","upper_joint_bound",upper_no;
完整代码如下:
VAR num upper_no;
VAR num lower_no;
TPErase;
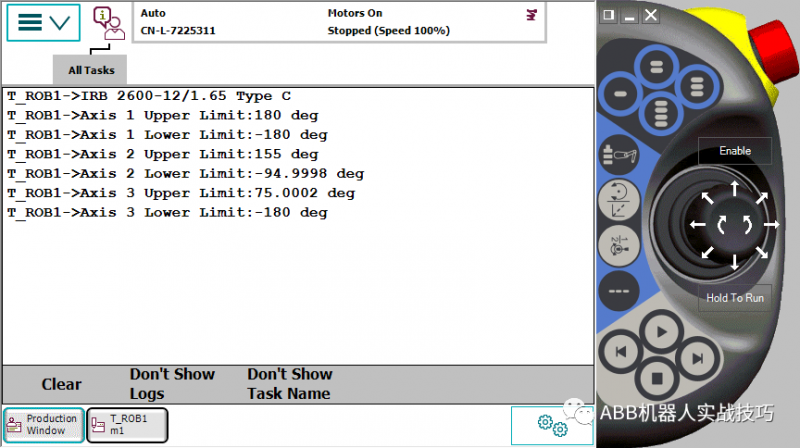
TPWrite GetSysInfo(\RobotType);
!获取机器人型号
FOR i FROM 1 TO 3 DO
ReadCfgData "/MOC/ARM/rob1_"+ValToStr(i),"upper_joint_bound",upper_no;
ReadCfgData "/MOC/ARM/rob1_"+ValToStr(i),"lower_joint_bound",lower_no;
TPWrite "Axis "+ValToStr(i)+" Upper Limit:"+ValToStr(upper_no/Pi*180)+" deg";
!获取到的数据是弧度,转化为角度
TPWrite "Axis "+ValToStr(i)+" Lower Limit:"+ValToStr(lower_no/Pi*180)+" deg";
ENDFOR
更多资讯:ABB机器人
