



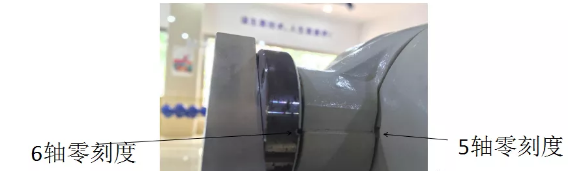
1.手动上电把机器人6个轴移分别移动到0刻度位置,按6-5-4-2-3-1
顺序(便于观察6个轴的0刻度位置,机器人六个关节轴的机械原点刻度位置示意图)。


4轴零刻度 3轴零刻度
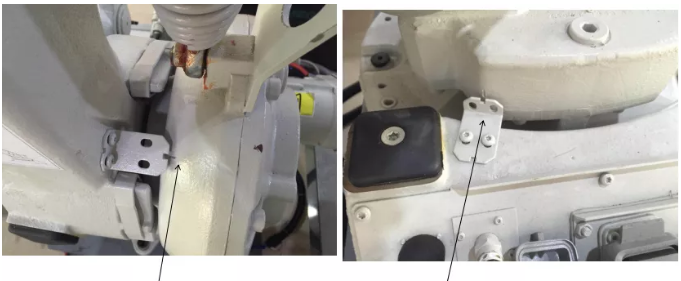
2轴零刻度 1轴零刻度
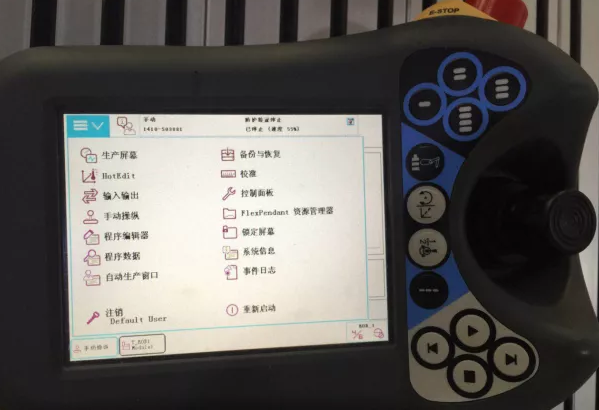
2.ABB主菜单——校准
3.校准——转数计数器——更新转数计数器
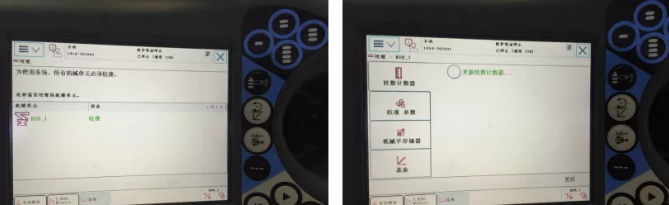
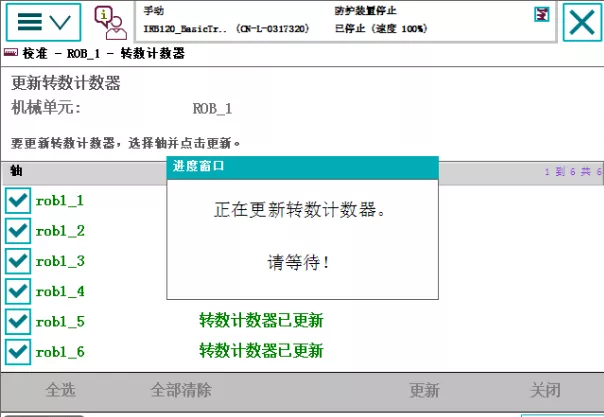
4.单击“全选”,然后单击“更新”
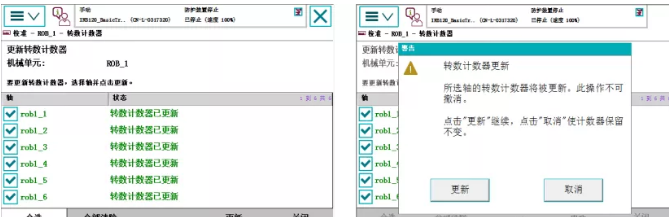
5.操作完成后,转数计数器更新完成。
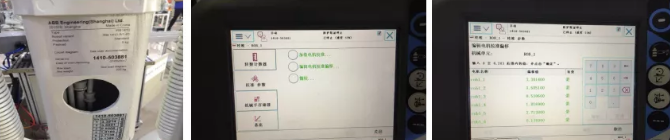
6.输入刚才从机器人本体记录的电机校准偏移数据,然后单击“确定”。
如果示教器中显示的数值与机器人本体上的标签数值一致,则无需修改,直接单击“取消”退出
更多资讯:ABB机器人
